
Es habitual en la robótica que las empresas desarrollen maquinas que ayuden a hacer diferentes trabajos dentro de fábricas o establecimientos para sustituir a un ser humano y así ahorrar tanto tiempo como dinero. Sin embargo, también se hacen pequeños robots que son capaces de hacer diferentes cosas. Por ejemplo, este último es capaz de soltar golpes muy rápido.
Hemos visto recientemente como la marca de automóviles Tesla presentaba su robot humanoide capaz de hacer funciones sencillas. Pero, aun así, se han creado otros robots que son capaces de usar una estructura que simula un brazo para agarrar diferentes piezas u objetos o incluso hacer girar hamburguesas en las cocinas de algunos restaurantes.
Un robot que simula el ataque de una mantis
Este robot puede llegar a simular a una mantis, que se caracteriza por tener un golpe muy rápido. Ha sido creado por un grupo de científicos de Harvard y creen que puede ayudar a conducir nuevas capacidades para las tecnologías humanas.
Para asestar su golpe, la mantis acumula presión en los músculos que se libera hacia delante de forma muy veloz. Dentro de los tendones de estos músculos hay dos pequeñas estructuras llamadas escleritos que sostienen los músculos hacia atrás, pero después permiten liberar la energía almacenada de una vez.
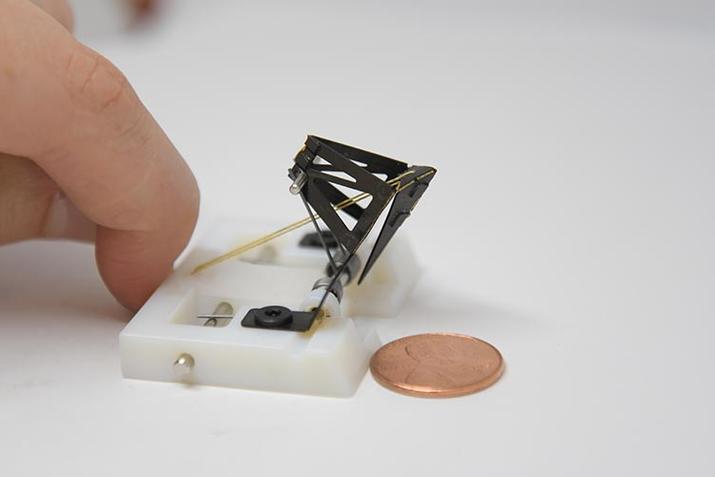
Sin embargo, los científicos de Harvard han querido mediante la creación de su robot mejorar este sistema. Esta pequeña máquina pesa tan solo un gramo y medio.
El robot no cuenta con la misma capacidad de perforación que una mantis, pero se puede mover más rápido que cualquier otro aparato similar que se haya hecho nunca. Su brazo puede llegar a alcanzar una velocidad de 26 metros por segundo.
Podría ser una función futura para algunas máquinas
Se chequearon imágenes en camara lenta tanto del movimiento del robot como del de una mantis y se llegó a la conclusión de que después de que se liberen las escleritas, la estructura de los músculos sirve como una especie de pestillo secundario. Esto ayuda a controlar el movimiento, manteniéndolo en su lugar hasta que se alcanza un punto de inflexión que hace que se dispare hacia delante.
Gracias a este proceso, se consigue liberar la energía elástica almacenada y se mejora la producción mecánica del sistema. Una estudiante ha asegurado que el proceso de enganche geométrico revela como los organismos generan una aceleración muy alta en estos movimientos que son tan rápidos como los golpes.
Así pues, la creación de este mecanismo en el robot puede suponer una nueva funcionalidad que se podría aplicar tanto a otros robots como a otros dispositivos.